
Drools le moteur de règles métiers open source (BRMS) : le chaînage arrière (backward chaining)
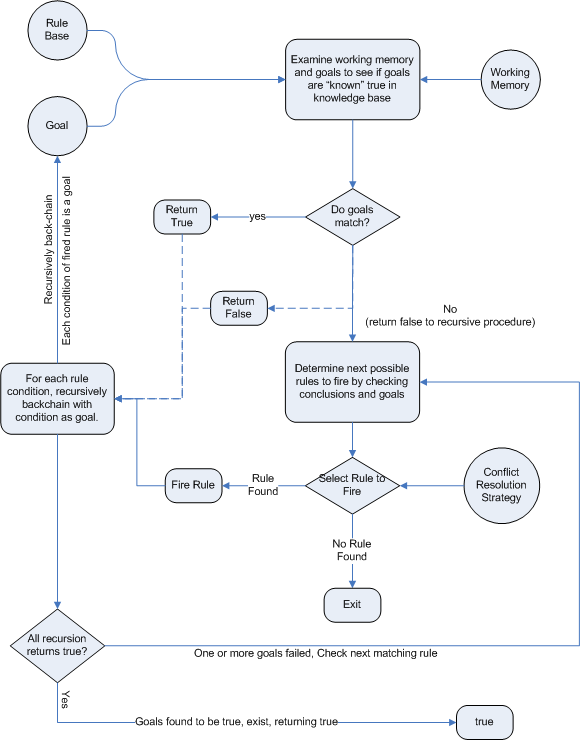
Le chaînage arrière est piloté par les objectifs, dans le sens où on commence par la conclusion que le moteur de règles va essayer de satisfaire.
S'il ne peut pas, il cherche des conclusions qu'il peut satisfaire.
C'est ce qu'on appelle des "sous-objectifs" qui peuvent satisfaire des parties inconnues de l'objectif courant.
Le processus continue jusqu'à ce que soit la conclusion initiale est prouvée ou soit il n'y a plus de sous-objectifs.
Prolog est un exemple de moteur de chaînage arrière.
Drools peut aussi faire du chaînage arrière en se référant aux requête de dérivation.
Avant, vous deviez faire un choix entre des systèmes comme OPS5 (chaînage avant) ou Prolog (chaînage arrière).
Aujourd'hui, les systèmes modernes fournissent les 2 types de raisonnement.
Il existe aussi d'autres techniques de raisonnement comme par exemple la logique floue.
Toutes ces techniques sont rassemblées sous l'appellation de Système de Raisonnement Hybride (Hybrid Reasoning Systems HRS).
L'intégration de la logique floue dans Drools est en train de se réaliser.
Rhona Maxwel
@rhona_helena
“Vouloir être de son temps, c’est déjà être dépassé.”
Eugène Ionesco
Voir aussi :
https://tutorialsysml.wordpress.com/
http://sysml-tutorial.tumblr.com/
http://urbanisation-si.wix.com/blog
http://urbanisme-si.wix.com/blog
http://urbanisation-si.wix.com/urbanisation-si
http://urbanisation-si.over-blog.com/
http://rhonamaxwel.over-blog.com/
http://urbanisation-des-si.blogspot.fr/
A découvrir aussi
- Drools le moteur de règles métiers open source (BRMS) : commençons par l'historique de l'Intelligence Artificielle (IA)
- Drools le moteur de règles métiers open source (BRMS) : Représentation des Connaissances et des Raisonnements (Knowledge Representation and Reasoning KRR)
- Drools le moteur de règles métiers open source (BRMS) : le chaînage avant (forward chaining)
Inscrivez-vous au site
Soyez prévenu par email des prochaines mises à jour
Rejoignez les 837 autres membres